Soft/Wet microrobotics
Presentation
Soft/Wet microrobotics researches are developed along 3 axis: fluidic or capillary microrobotics (based on physics of fluids), soft microrobotics (based on elasticity and materials) and microfabrication. Our work is devoted to answering scientific questions relate to physics of fluids and materials. Our methods relate to mechanical engineering: modelling and simulation, manufacturing (down to 200nm), design, dynamics and control, experimental force measurement (down to 1nN). The applications fields cover micromanipulation, drug delivery, medical devices, industrial micro-assembly.
Building on advances in miniaturization and soft matter, surface tension effects are a major key to the development of soft/fluidic microrobotics. Capillary effects benefit from scaling, and surface tension of liquid provides structural properties, actuation, adhesion, confinement and compliance, which are all functions necessary in micro and nanosystems. Various applications are under development: microfluidic and LOC devices, soft gripping and manipulation of particles, colloidal and interfacial assemblies, fluidic/droplet mechatronics. The capillary action is ubiquitous in drops, bubbles and menisci, opening a broad spectrum of technological solutions and scientific investigations.
Identified grand challenges to the emergence of fluidic microrobotics include speeding up the process (how to master the dynamics of surface tension effects?), the mastering of the hysteresis arising from wetting and evaporation, the improvement of dispensing and handling of tiny droplets, to develop a mechatronics approach for the control of surface tension effects.
Our microfabrication facilities involve world-class equipment such as Nanoscribe Photonics GT, as well as simple 3D printers for rapid prototyping. These pieces of equipment are operated among the MicroMilli platform.
Contact: Pierre Lambert
Media
-
Capillary bridge between a conical tip and flat substrate -
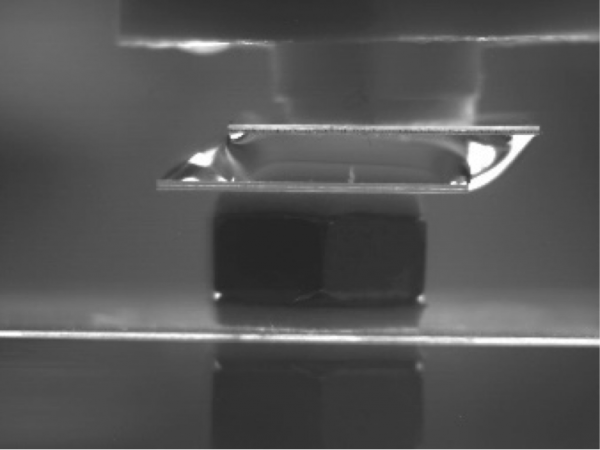
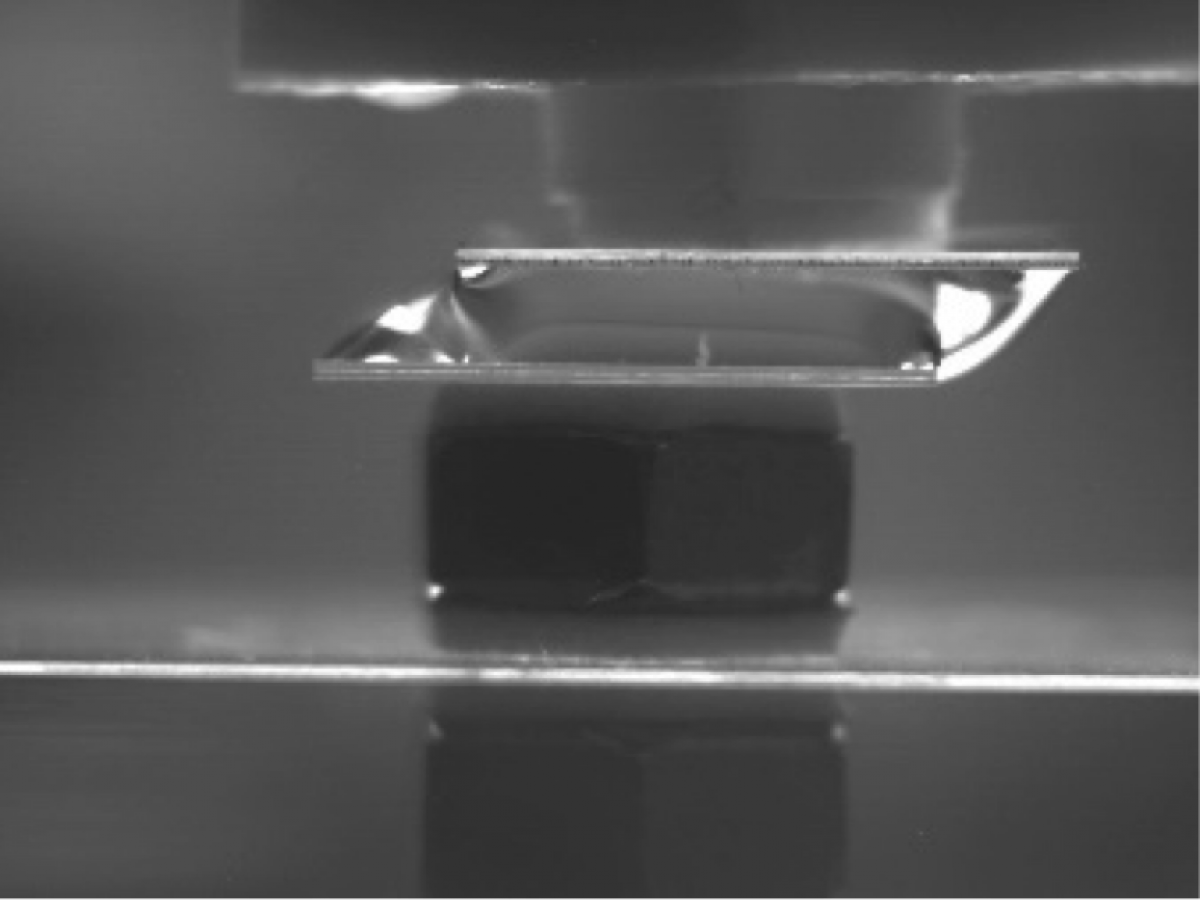
Shear of a capillary meniscus to measure restoring capillary forces used in self-alignment -

Example of elastocapillary structure: a liquid bridge deforming a cantilevered beam -
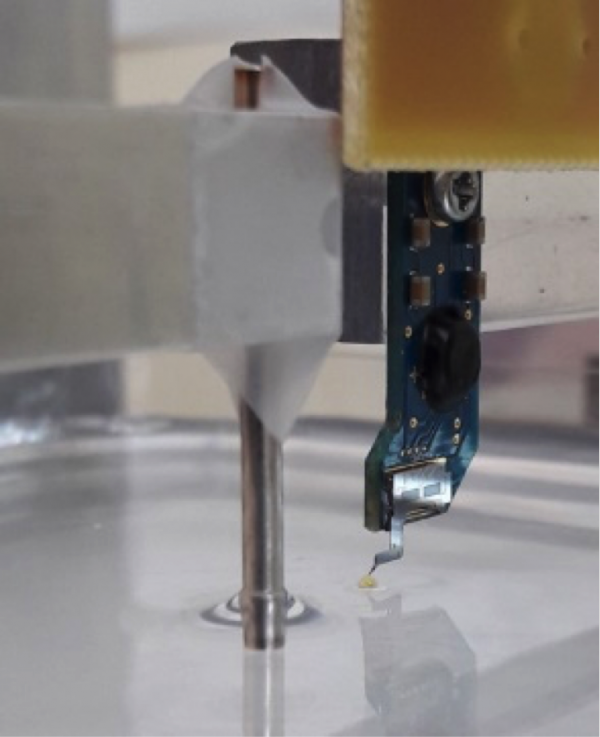
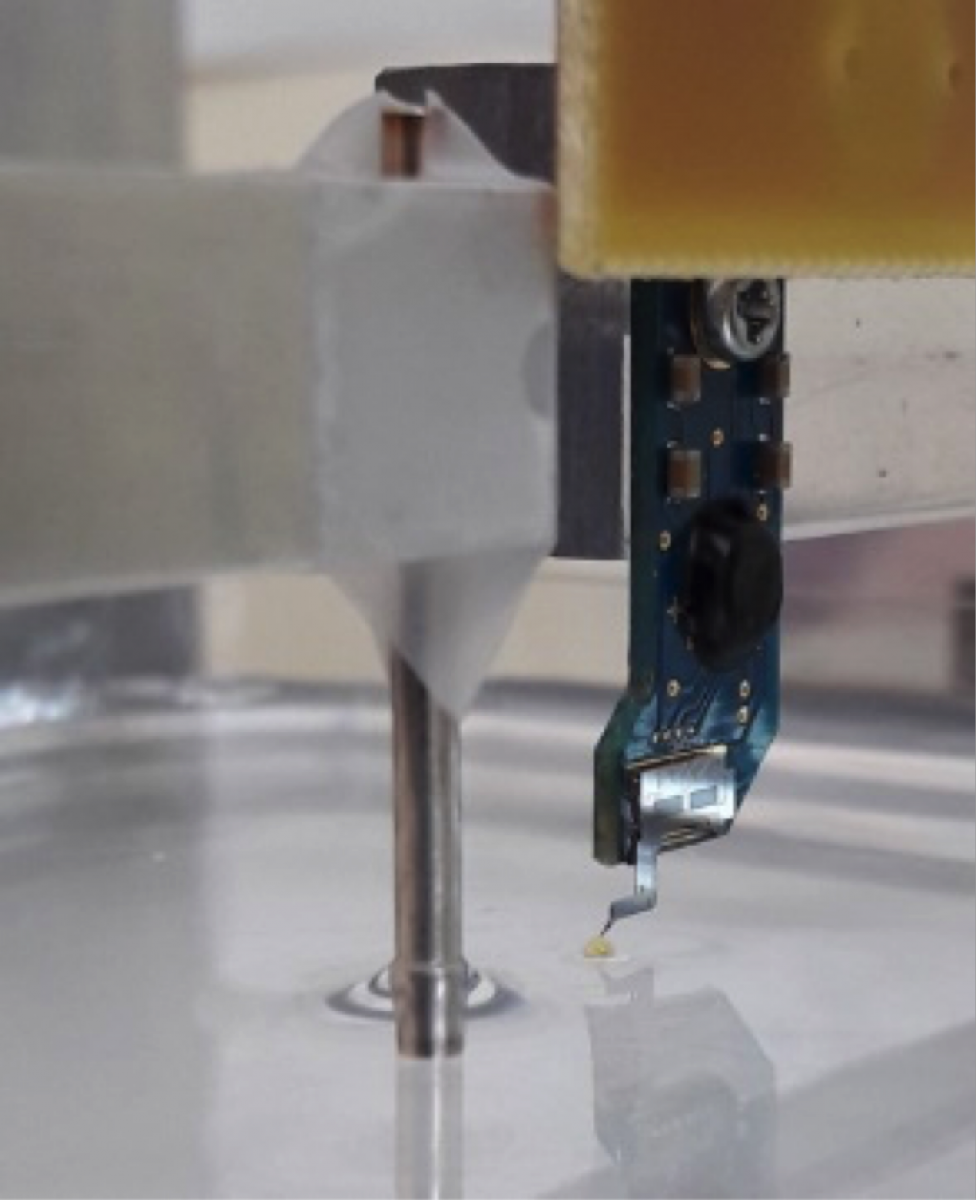
Measurement of Cheerios force with a FemtoTools sensor -

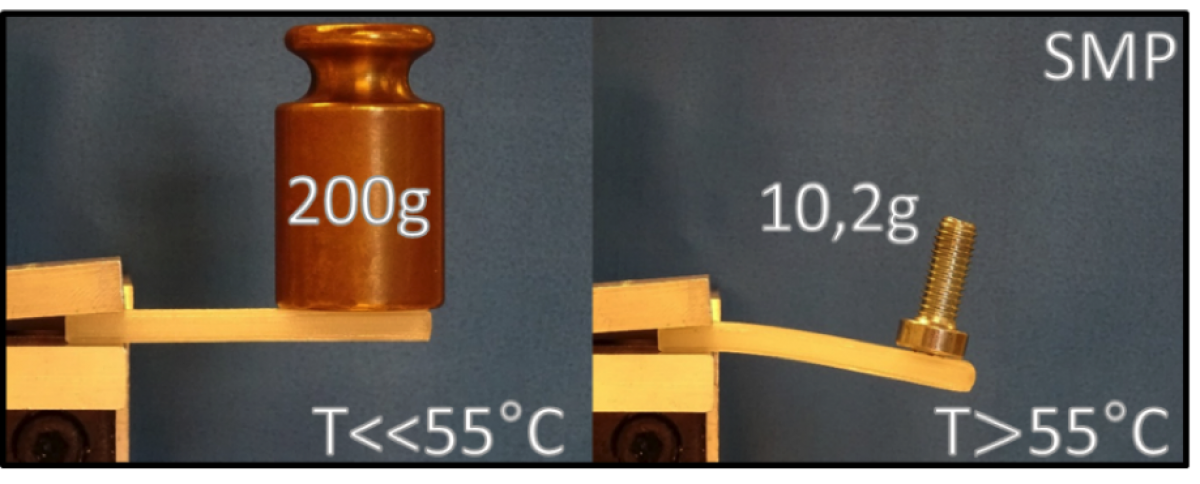
4D department logo: planar FDM printed shape memory polymer -
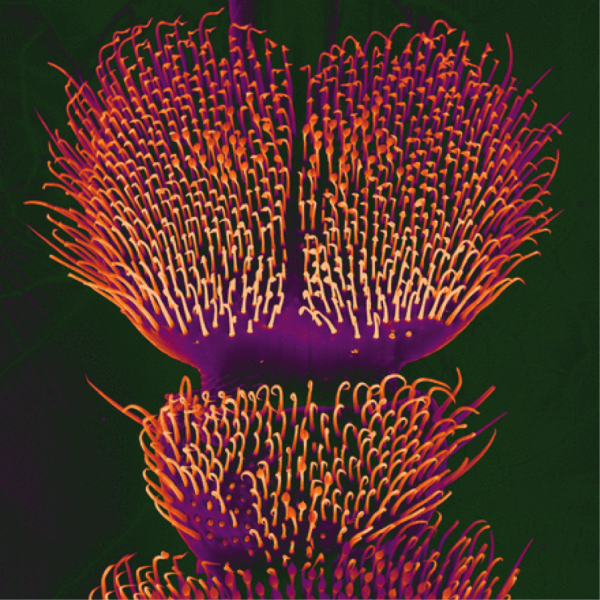
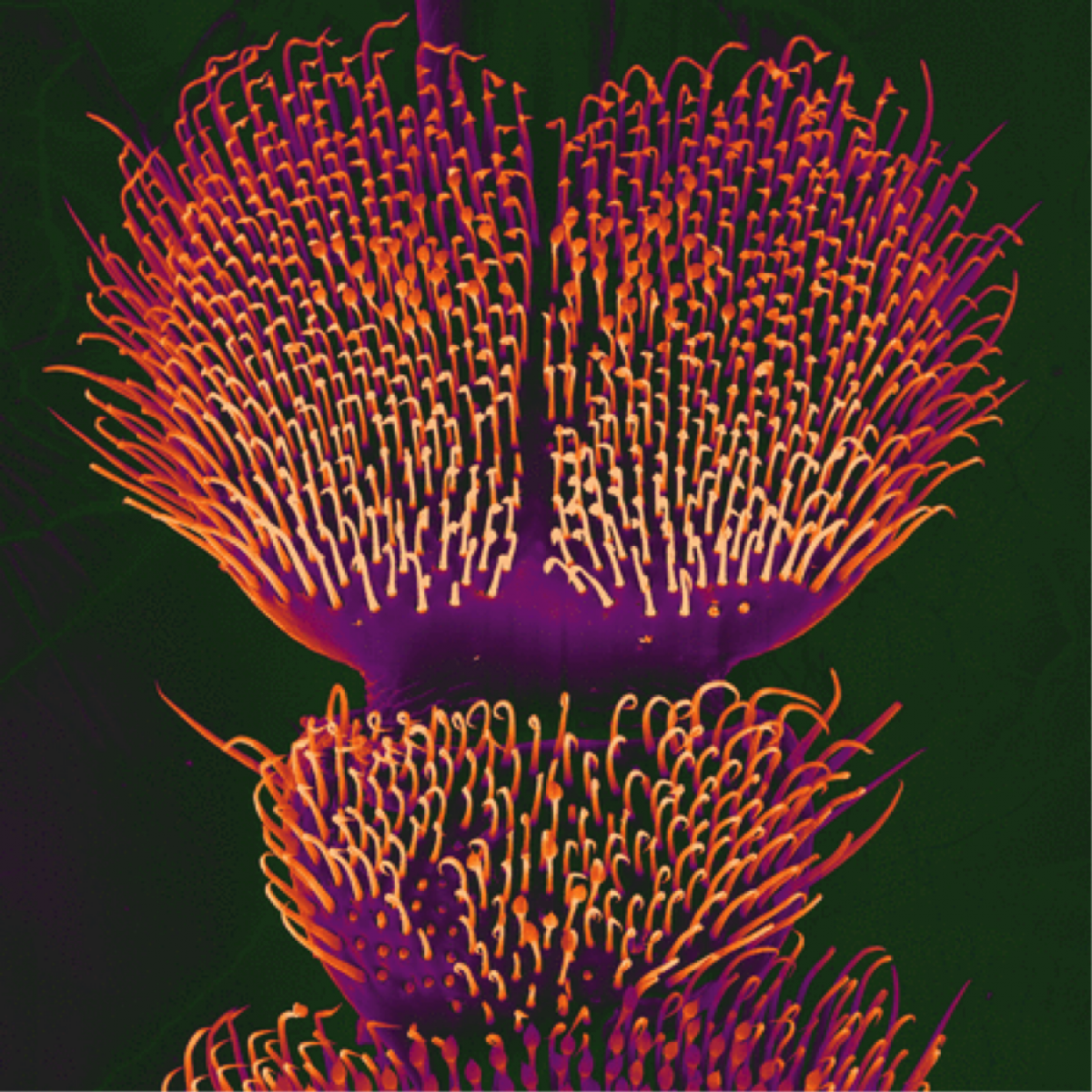
SEM image of a Gastrophysa viridula male beetle tarsus highlighting the micrometric adhesion setae which bend when subjected to capillary forces arising from femtoliters of liquid secretion. Image by P. Compère and S. Gernay -

Funicular regime of granular media: a liquid bridge connects more than 2 grains -
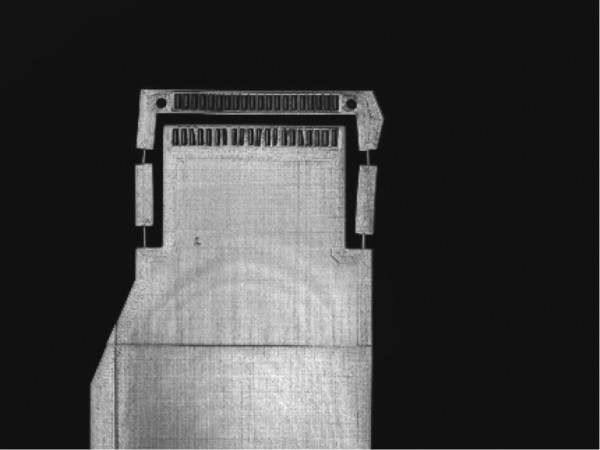
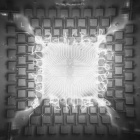
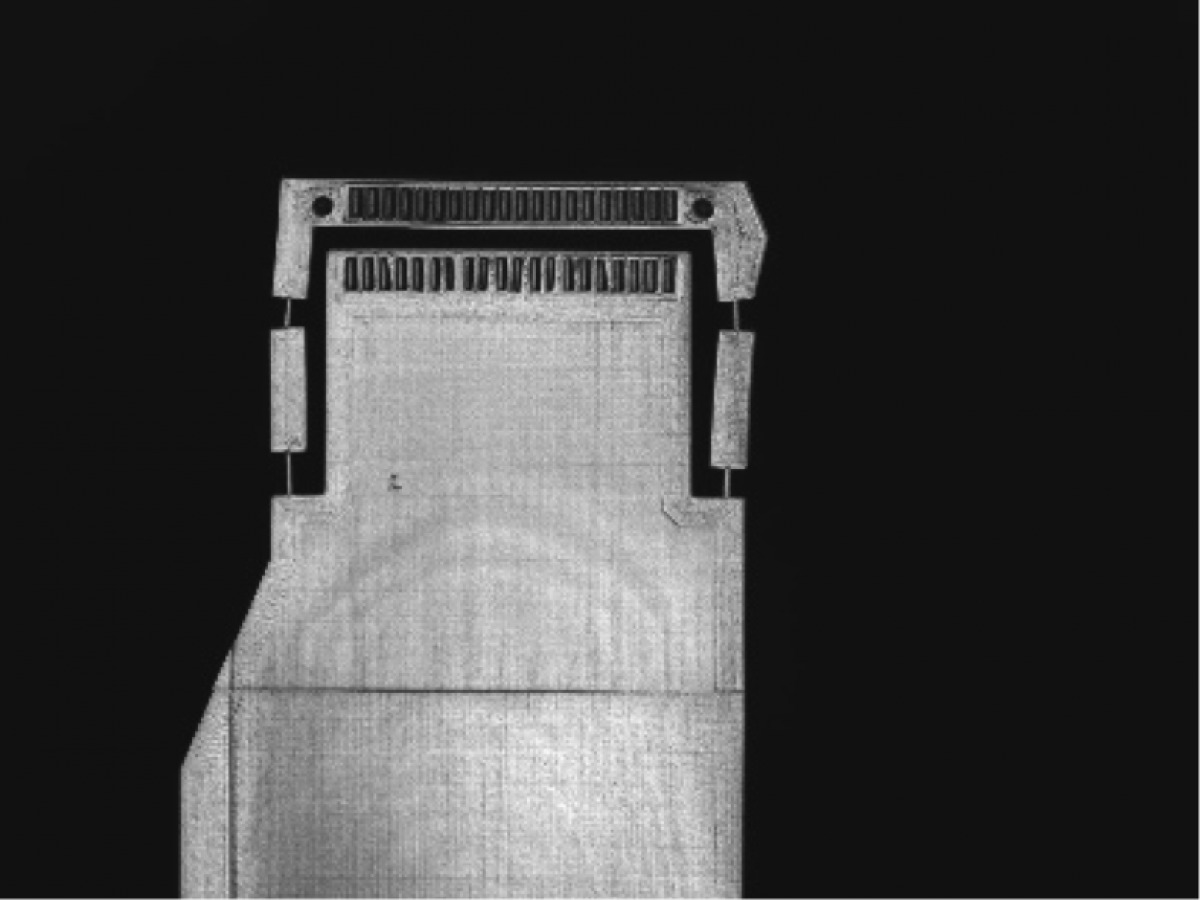
Compliant structure printed with Nanoscribe Photonics GT used as force sensor -
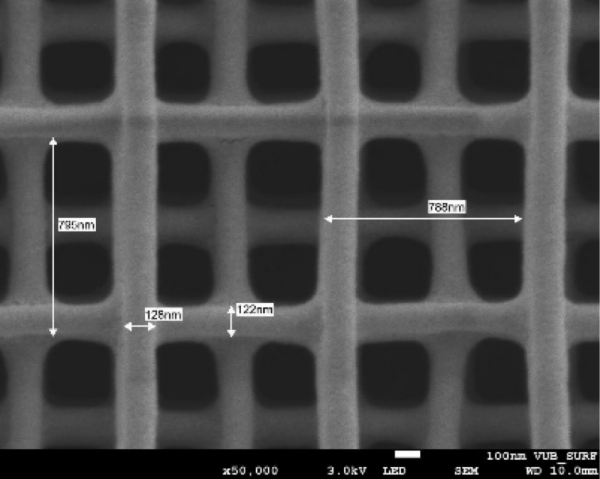
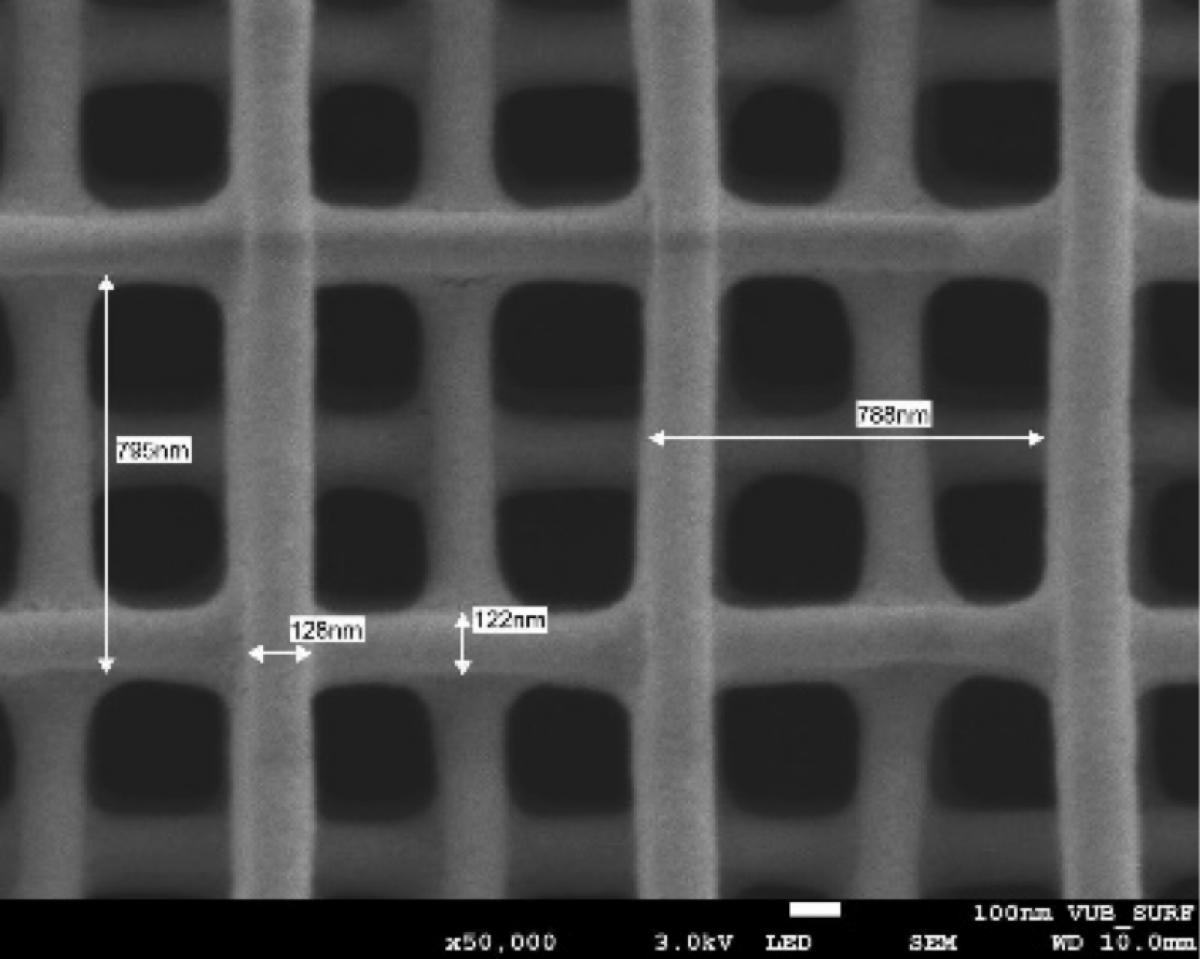
Calibration structure illustrating the submicrometric printing resolution of the Nanoscribe Photonics Platform -
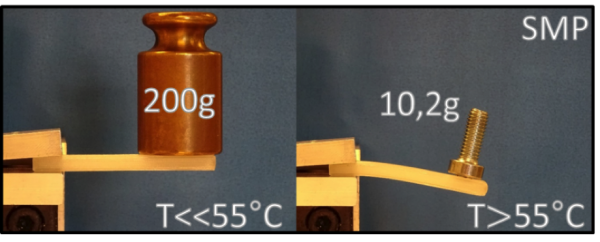
Stiffness decrease tuned by temperature in shape memory polymers



Researchers
-
 Pierre LambertProfessorsUniversity professor
Pierre LambertProfessorsUniversity professor -
 Thomas LessinnesProfessorsUniversity professor
Thomas LessinnesProfessorsUniversity professor -
 Loïc BlancStaffLecturer, PhD
Loïc BlancStaffLecturer, PhD -
 Adam ChafaïStaffLab manager, PhD
Adam ChafaïStaffLab manager, PhD -
 Gilles DecrolyStaffLecturer, PhD
Gilles DecrolyStaffLecturer, PhD -
 Clément RigautPost-doctoral researchersNasal cast project
Clément RigautPost-doctoral researchersNasal cast project -
 Manon CassignolPhD studentsFNRS - Voxel
Manon CassignolPhD studentsFNRS - Voxel -
 Margaux ManneartsPhD studentsWin4Doc grant
Margaux ManneartsPhD studentsWin4Doc grant -
 Michel-Antony Ngan YambPhD studentsTeaching assistant - PhD student
Michel-Antony Ngan YambPhD studentsTeaching assistant - PhD student -
 Esra YalçinkayaPhD students3D-Printed Voxel-based Soft Actuators
Esra YalçinkayaPhD students3D-Printed Voxel-based Soft Actuators
Selected publications
De Lara, M.T., Droz, L.A., Chah, K., Lambert, P., Collette, C., & Caucheteur, C. Characterization of birefringent Bragg gratings waveguides inscribed with the Femtoprint device. Results in Optics, 18, art. no. 100764. 2025
Mincheva, R., Odent, J., Abdeljawad, M.B., Martin, B., Lambert, P., & Raquez, J.M. 3D-printed gradient-like poly(L,L-lactide)-based auxetic materials for bone regeneration applications. Progress in Additive Manufacturing, art. no. 115102. 2025
Piñan Basualdo, F.N., Stephan, O., Bolopion, A., Gauthier, M., & Lambert, P. Pose Control of Millimeter-Scale Objects in a Laser-Powered Thermocapillary Manipulation Platform. IEEE/ASME Transactions on Mechatronics, 29(1), 64-73. 2024
Piñan Basualdo, F.N., Bolopion, A., Gauthier, M., & Lambert, P. Solving the Non-Linear Motion in a Micromanipulation System Powered by Thermocapillary Flows. IEEE Robotics and Automation Letters, 8(8), 4785-4790. 2023
Amez-Droz, L., Tunon de Lara, M., Collette, C., Caucheteur, C., & Lambert, P. Instrumented Flexible Glass Structure: A Bragg Grating Inscribed with Femtosecond Laser Used as a Bending Sensor. Sensors, 23(19), art. no. 8018. 2023
Barbot, A., Ortiz, F., Bolopion, A., Gauthier, M., & Lambert, P. Exploiting Liquid Surface Tension in Microrobotics. Annual Review of Control, Robotics, and Autonomous Systems, 6, 313-334. 2023
De Lara, M.T., Amez-Droz, L., Chah, K., Lambert, P., Collette, C., & Caucheteur, C. Femtosecond pulse laser-engineered glass flexible structures instrumented with an in-built Bragg grating sensor. Optics Express, 31(18), pp. 29730 – 29743. 2023
Decroly, G., Chafaï, A., de Timary, G., Gandolfo, G., Delchambre, A., & Lambert P. A Voxel-Based Approach for the Generation of Advanced Kinematics at the Microscale. Advanced Intelligent Systems, 5(7), art. no. 2200394. 2023
Piñan Basualdo, F.N., Gardi, G., Wang, W., Demir, S.O., Bolopion, A., Gauthier, M., Lambert, P., & Sitti M. Control and Transport of Passive Particles Using Self-Organized Spinning Micro-Disks. IEEE Robotics and Automation Letters, 7(2), 2156-2161. 2022
Collard, Y., Basualdo, F.N., Bolopion, A., Gauthier, M., Lambert, P., & Vandewalle, N. Controlled transitions between metastable states of 2D magnetocapillary crystals. Scientific Reports, 12(1), art. no. 16027. 2022
Chafaï, A., Ibrahimi, A., & Lambert, P. A Volume-Tuning Capillary Gripper That Enhances Handling Capabilities and Enables Testing of Micro-Components. Micromachines, 13(8), art. no. 1323. 2022
Blanc, L., François, B., Delchambre, A., & Lambert P. Characterization and modeling of granular jamming: models for mechanical design. Granular Matter, 23(1), art. no. 6. 2021
Piñan Basualdo, F.N., Terrazas Mallea, R., Scheid, B., Bolopion, A., Gauthier, M., & Lambert, P. Effect of insoluble surfactants on a thermocapillary flow. Physics of Fluids, 33(7), art. no. 072106. 2021
Decroly, G., Raffoul, R., Deslypere, C., Leroy, P., Van Hove, L., Delchambre, A., & Lambert, P. Optimization of Phase-Change Material–Elastomer Composite and Integration in Kirigami-Inspired Voxel-Based Actuators. Frontiers in Robotics and AI, 8, art. no. 672934. 2021
Decroly, G., Lambert, P., & Delchambre, A. A Soft Pneumatic Two-Degree-of-Freedom Actuator for Endoscopy. Frontiers in Robotics and AI, 8, art. no. 768236. 2021
Piñan Basualdo, F.N., Bolopion, A., Gauthier, M., & Lambert, P. A microrobotic platform actuated by thermocapillary flows for manipulation at the air-water interface. Science Robotics, 6(52), art. no. eabd3557. 2021
Chafaï, A., Vitry, Y., Dehaeck, S., Gallaire, F., Scheid, B., Colinet, P., & Lambert, P. Two-dimensional modelling of transient capillary driven damped micro-oscillations and self-alignment of objects in microassembly. Journal of Fluid Mechanics. 2021
Lehmann, O., Rauch, J.-Y., Vitry, Y., Pinsard, T., Lambert, P., & Gauthier, M. Miniaturized Robotics: The Smallest Camera Operator Bot Pays Tribute to David Bowie. IEEE Robotics and Automation Magazine, 27(3), 22-28. 2020
Decroly, G., Mertens, B., Lambert, P., & Delchambre, A. Design, characterization and optimization of a soft fluidic actuator for minimally invasive surgery. International Journal of Computer Assisted Radiology and Surgery, 15, 333-340. 2020
Projects
-
FEMTOPRINT project
Glass-based optomicromechatronics. PI: Pierre Lambert
Funded by the FNRS -
SWIMMERS project
Thermo-magneto-capillary self-assembly. PI: Pierre Lambert
Funded by the FNRS -
NANOSCRIBE project
3D microstructuration and microengineering of surfaces with 2 photon lithography. PI: Pierre Lambert
Funded by the FNRS -
Instrumented flexible glass structure (INFuSE)
Engrave photonic functions in glass microstructures, in order to sense mechanical strains pr biochemical compounds. Microfabrication of glass-based MEMS for precision mechanics, force sensing and vibrations control. PI: Pierre Lambert
Funded by the FNRS -
GLASSCATH
Instrumented multimode optical fiber tip to be inserted in the operating channel of a bronchoscope for the mechanical detection of tumoral tissues. PI: Pierre Lambert
Funded by ULB -
Catheter stabilization in bronchial endoscopy
Win4Doc project funded by the Région Wallonne (Win4Doc Grant n° 2310045), in collaboration with Lys Medical (startup company located in Belgium). PI: Pierre Lambert
Funded by the Région Wallonne -
Voxels
Soft structures made of active voxels, produced with digital manufacturing at the sub-millimetric scale, providing mobility in lung endoscopy. PI: Pierre Lambert
Funded by the FNRS